隨著自動(dòng)駕駛技術(shù)向L3級(jí)及以上發(fā)展,高精度地圖已成為不可或缺的核心要素。它超越了傳統(tǒng)導(dǎo)航地圖,提供了厘米級(jí)的車道級(jí)幾何信息、豐富的語(yǔ)義信息以及實(shí)時(shí)動(dòng)態(tài)更新能力。高精度地圖數(shù)據(jù)的高效、可靠播發(fā),并與自動(dòng)駕駛控制器進(jìn)行深度信息交互,構(gòu)成了一個(gè)復(fù)雜而關(guān)鍵的信息系統(tǒng)。本文將深入探討這一交互過(guò)程及其背后的系統(tǒng)集成服務(wù)。
一、高精度地圖數(shù)據(jù)播發(fā):從云端到車端
高精度地圖數(shù)據(jù)的播發(fā)并非簡(jiǎn)單的文件傳輸,而是一個(gè)分層、分時(shí)、按需的動(dòng)態(tài)服務(wù)過(guò)程。
- 數(shù)據(jù)分層與組織:高精度地圖數(shù)據(jù)通常分為多個(gè)圖層,包括靜態(tài)層(如車道線、交通標(biāo)志、路沿)、準(zhǔn)靜態(tài)層(如道路施工信息)和動(dòng)態(tài)層(如實(shí)時(shí)交通流、天氣、事故)。播發(fā)系統(tǒng)需要根據(jù)車輛位置、規(guī)劃路徑和場(chǎng)景需求,智能組織需要下發(fā)的數(shù)據(jù)包,避免傳輸冗余。
- 播發(fā)渠道與協(xié)議:主要依賴蜂窩網(wǎng)絡(luò)(4G/5G V2X)進(jìn)行云端到車端的廣域播發(fā),同時(shí)結(jié)合路側(cè)單元(RSU)進(jìn)行局部熱點(diǎn)區(qū)域增強(qiáng)播發(fā)。通信協(xié)議通常采用專為自動(dòng)駕駛設(shè)計(jì)的標(biāo)準(zhǔn),如Autosar SOME/IP、ROS2 DDS或基于MQTT、HTTP/2的定制協(xié)議,確保低延遲、高可靠性和安全性。
- 增量更新與局部重建:為了節(jié)省帶寬和保持地圖鮮度,播發(fā)系統(tǒng)主要采用增量更新方式,只下發(fā)發(fā)生變化的地圖要素。車端系統(tǒng)接收增量包后,與本地存儲(chǔ)的基礎(chǔ)地圖進(jìn)行融合,完成局部地圖的實(shí)時(shí)重建。
二、與自動(dòng)駕駛控制器的信息交互:協(xié)同感知與決策
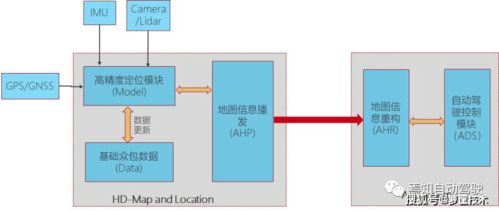
自動(dòng)駕駛控制器是車輛的“大腦”,它接收來(lái)自傳感器(攝像頭、激光雷達(dá)、毫米波雷達(dá))的實(shí)時(shí)感知數(shù)據(jù)和高精度地圖的先驗(yàn)信息,進(jìn)行融合處理,最終做出規(guī)劃與控制決策。交互的核心在于“先驗(yàn)”與“實(shí)時(shí)”的互補(bǔ)。
- 定位層交互:這是交互的基礎(chǔ)。自動(dòng)駕駛控制器將GNSS、IMU及視覺(jué)/激光點(diǎn)云匹配產(chǎn)生的車輛粗略位置,與高精度地圖提供的精確道路模型進(jìn)行匹配,實(shí)現(xiàn)厘米級(jí)定位。地圖為定位提供強(qiáng)大的約束和參考框架。
- 感知層交互:高精度地圖作為“記憶性感知”,提前告知控制器前方道路的精確結(jié)構(gòu)(如曲率、坡度、車道數(shù))、固定交通設(shè)施位置。這極大地提升了實(shí)時(shí)感知的效率與可靠性。例如,控制器可以預(yù)先知道前方500米有匝道,從而提前調(diào)整感知算法的關(guān)注區(qū)域,更容易識(shí)別匝道口的車輛和標(biāo)線。地圖的語(yǔ)義信息(如限速、禁止超車區(qū))直接輸入給決策模塊。
- 規(guī)劃與決策層交互:這是交互的深層價(jià)值所在。
- 路徑規(guī)劃:基于地圖的車道級(jí)路網(wǎng),控制器可以規(guī)劃出最優(yōu)行駛車道和參考路徑,尤其是在復(fù)雜立交、隧道等傳感器受限場(chǎng)景,地圖提供的全局路徑至關(guān)重要。
- 行為決策:地圖提供的車道連接關(guān)系、交通規(guī)則(如潮汐車道時(shí)間)、長(zhǎng)期靜態(tài)障礙物(如固定路障)等信息,直接參與駕駛行為決策(如變道、跟車、匯入)。
- 預(yù)見(jiàn)性控制:知道前方道路的曲率和坡度,控制器可以提前優(yōu)化車速、擋位和懸架設(shè)置,提升舒適性與能耗經(jīng)濟(jì)性。
- 反饋與閉環(huán):車輛行駛過(guò)程中,傳感器也會(huì)發(fā)現(xiàn)地圖與實(shí)際不符之處(如新增臨時(shí)路障、標(biāo)線磨損)。這些差異信息可以通過(guò)控制器打包,經(jīng)安全審核后,匿名回傳至云端地圖系統(tǒng),用于眾源更新,形成“使用-反饋-更新”的閉環(huán)。
三、信息系統(tǒng)集成服務(wù):構(gòu)建無(wú)縫交互的橋梁
實(shí)現(xiàn)上述復(fù)雜交互,離不開(kāi)專業(yè)、全面的信息系統(tǒng)集成服務(wù)。該服務(wù)貫穿于車、路、云整個(gè)體系。
- 車端系統(tǒng)集成:
- 硬件集成:確保自動(dòng)駕駛域控制器擁有足夠的算力、存儲(chǔ)和通信接口(如CAN FD、以太網(wǎng))來(lái)處理和接收地圖數(shù)據(jù)。
- 軟件中間件集成:部署和配置通信中間件(如ROS2、AUTOSAR Adaptive),建立可靠的數(shù)據(jù)訂閱/發(fā)布機(jī)制,確保地圖數(shù)據(jù)流能以低延遲、確定性的方式分發(fā)給定位、感知、規(guī)劃等各功能模塊。
- 功能安全與預(yù)期功能安全(SOTIF):集成服務(wù)需確保地圖數(shù)據(jù)流的完整性、時(shí)效性校驗(yàn)機(jī)制,設(shè)計(jì)降級(jí)策略(如地圖失效時(shí)依賴純傳感器感知),以滿足ASIL等級(jí)要求。
- 通信網(wǎng)絡(luò)集成:設(shè)計(jì)并優(yōu)化從云端地圖服務(wù)器到車載T-Box/通信模組的網(wǎng)絡(luò)鏈路,可能涉及多運(yùn)營(yíng)商SIM卡管理、網(wǎng)絡(luò)質(zhì)量監(jiān)控、邊緣計(jì)算節(jié)點(diǎn)部署等,以保障在移動(dòng)和復(fù)雜環(huán)境下的連接穩(wěn)定性。
- 云端服務(wù)平臺(tái)集成:
- 地圖服務(wù)API集成:將高精度地圖供應(yīng)商提供的API(如地圖下載、位置查詢、增量更新通知)與車端的請(qǐng)求管理模塊深度集成。
- 與車輛云平臺(tái)融合:將地圖服務(wù)與車輛的遠(yuǎn)程診斷、OTA升級(jí)、車隊(duì)管理平臺(tái)進(jìn)行集成,實(shí)現(xiàn)統(tǒng)一的數(shù)據(jù)管理和任務(wù)調(diào)度。
- 數(shù)據(jù)閉環(huán)平臺(tái)搭建:構(gòu)建從車輛數(shù)據(jù)采集、脫敏、上傳、分析到地圖生產(chǎn)更新的完整工具鏈和數(shù)據(jù)管道。
- 測(cè)試與驗(yàn)證服務(wù):提供全鏈條的集成測(cè)試,包括實(shí)驗(yàn)室仿真測(cè)試(注入各種地圖場(chǎng)景和異常)、封閉場(chǎng)地測(cè)試和實(shí)際道路測(cè)試,驗(yàn)證從數(shù)據(jù)播發(fā)、接收到控制器應(yīng)用的全流程正確性、性能與魯棒性。
###
高精度地圖數(shù)據(jù)播發(fā)與自動(dòng)駕駛控制器的信息交互,是驅(qū)動(dòng)高階自動(dòng)駕駛落地的“神經(jīng)系統(tǒng)”。它不僅僅是一個(gè)數(shù)據(jù)管道,更是一個(gè)深度融合、智能協(xié)同的認(rèn)知過(guò)程。而專業(yè)的信息系統(tǒng)集成服務(wù),則是構(gòu)建這一復(fù)雜、安全、可靠系統(tǒng)的關(guān)鍵工程保障,它將離散的硬件、軟件、網(wǎng)絡(luò)和服務(wù)組件,集成為一個(gè)能夠應(yīng)對(duì)真實(shí)世界挑戰(zhàn)的有機(jī)整體。隨著車路云一體化深入,這套交互體系與集成服務(wù)將變得更加動(dòng)態(tài)、智能和協(xié)同。